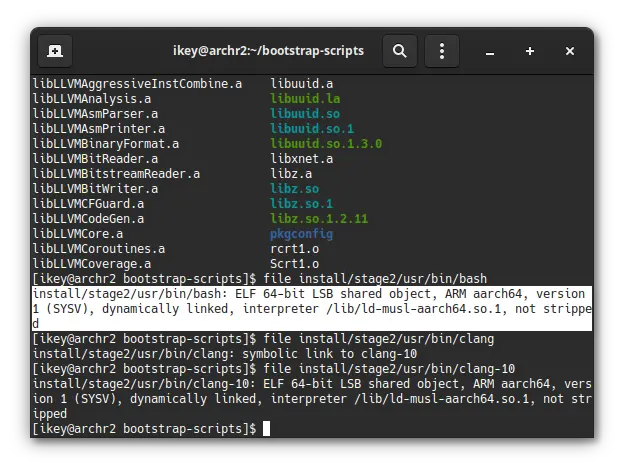
Just in case you thought we were sleeping behind the wheel, we've got another blogpost for your viewing pleasure. In a nutshell, we completed stage2 bootstrap.
In order to simplify life, we greatly reduced the size of the stage2 build component.
This decision was taken to better support cross-compilation in the face of software that
is distinctly cross-compilation unfriendly.
A support stage, stage2.5 will be added which will chroot into a copy of stage2, and
natively compile a small handful of packages required to complete stage3, also within the
chroot environment.
For cross-compilation, we'll be relying on qemu-static to complete 2.5 and 3.
However, at this point in time, we have the following:
- Working cross-compilation of the entire bootstrap
- Complete LLVM based toolchain:
clang,llvm,libc++,lib++abi,libunwind - Entirety of stage2 built with
musllibc. - Working, minimal,
chrootenvironment as product ofstage2, with working compiler (C&C++)

This is a major milestone for the project, as it is an early indication that we're self hosting.
Multiple Architecture Support
At this point in time, we now have build support for two targets: x86_64 and ARMV8a.
Our intent is to support haswell and above, or zen and above, for the x86_64 target.
With our ARMv8 target, we're currently looking to support the Pine Book Pro, if we can
manage to get hold of some testing hardware. It will likely be some time after full
x86_64 support that we'd officially support more hardware, however it is very important
that our bootstrap-scripts can trivially target multiple platforms.

An interesting change when cross-compiling for other architectures, is the chicken & egg
situation with compiler-rt and other LLVM libraries. When we detect cross-compilation,
we'll automatically bootstrap compiler-rt before building musl, and then cross-compile
libc++, libc++abi and libunwind to ensure stage1 can produce native binaries for
the target with correct linkage.
Next Steps
As we've mentioned, we'll push ahead with 2.5 and 3, which will complete the initial
Serpent OS bootstrap, producing a self-hosting, self-reliant rootfs. This is the point
at which we can begin to bolt-on package management, boot management, stateless configuration
utilities, etc.
Our initial focus is x86_64 hardware with UEFI, and as we gain access to more hardware we
can enable support for more targets, such as ARMv8a. Our bootstrap-scripts will always
remain open source, as will all processes and tooling within Serpent OS, or anything used
to build and deploy Serpent OS.
This will make it much easier in future to create custom spins of Serpent OS for different configurations or targets, without derailing the core project. It should therefore be the simplest thing in the world to fork Serpent OS to one's liking or needs.
If you want to support our work, you can jump onto our IRC channel (#serpentOS on freenode)
or support us via the Team page.